DIY a BB-8 Robot指导老师:刘利刚 |

项目简介
原理说明:
结构设计
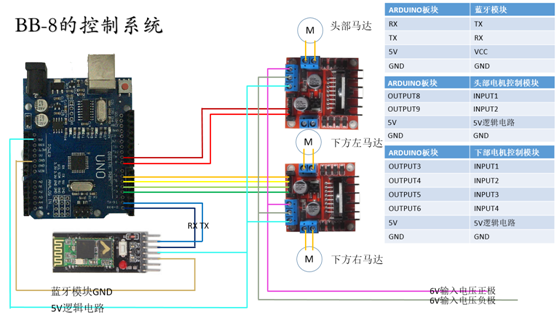
Figure 1: 控制系统
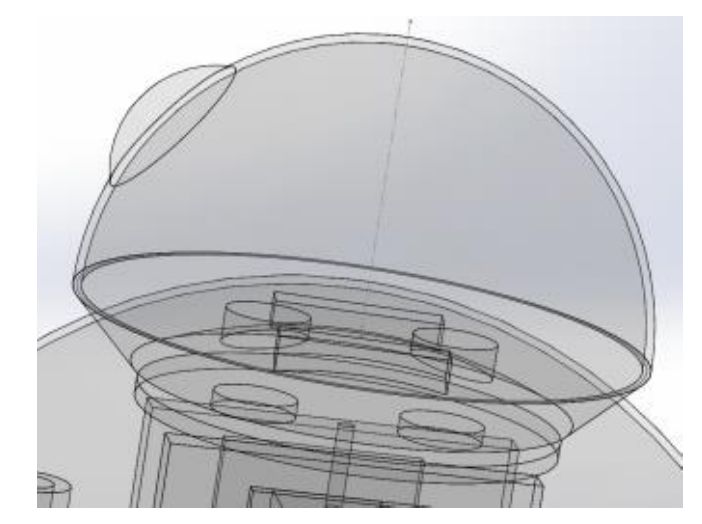
Figure 2: 头部结构
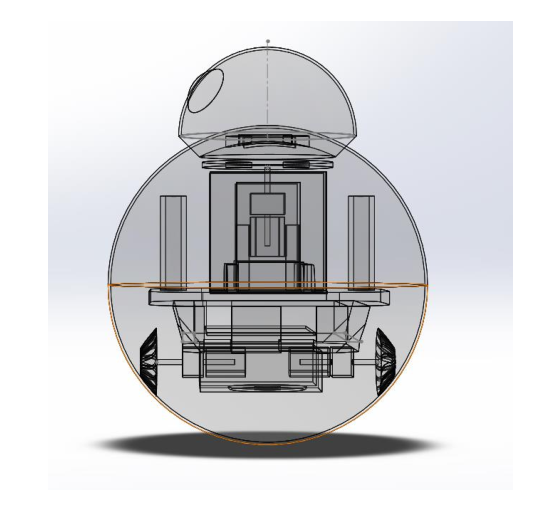
Figure 3: 整体结构
项目视频
感想与不足